Modern Robotics, Chapter 3: Introduction to Rigid-Body Motions Northwestern Robotics 2:10 7 years ago 44 356 Далее Скачать
Modern Robotics, Chapter 3.3.3: Exponential Coordinates of Rigid-Body Motion Northwestern Robotics 5:00 7 years ago 24 441 Далее Скачать
Modern Robotics, Chapter 3.3.2: Twists (Part 1 of 2) Northwestern Robotics 5:00 7 years ago 47 724 Далее Скачать
Modern Robotics, Chapter 8.2: Dynamics of a Single Rigid Body (Part 1 of 2) Northwestern Robotics 6:13 7 years ago 21 371 Далее Скачать
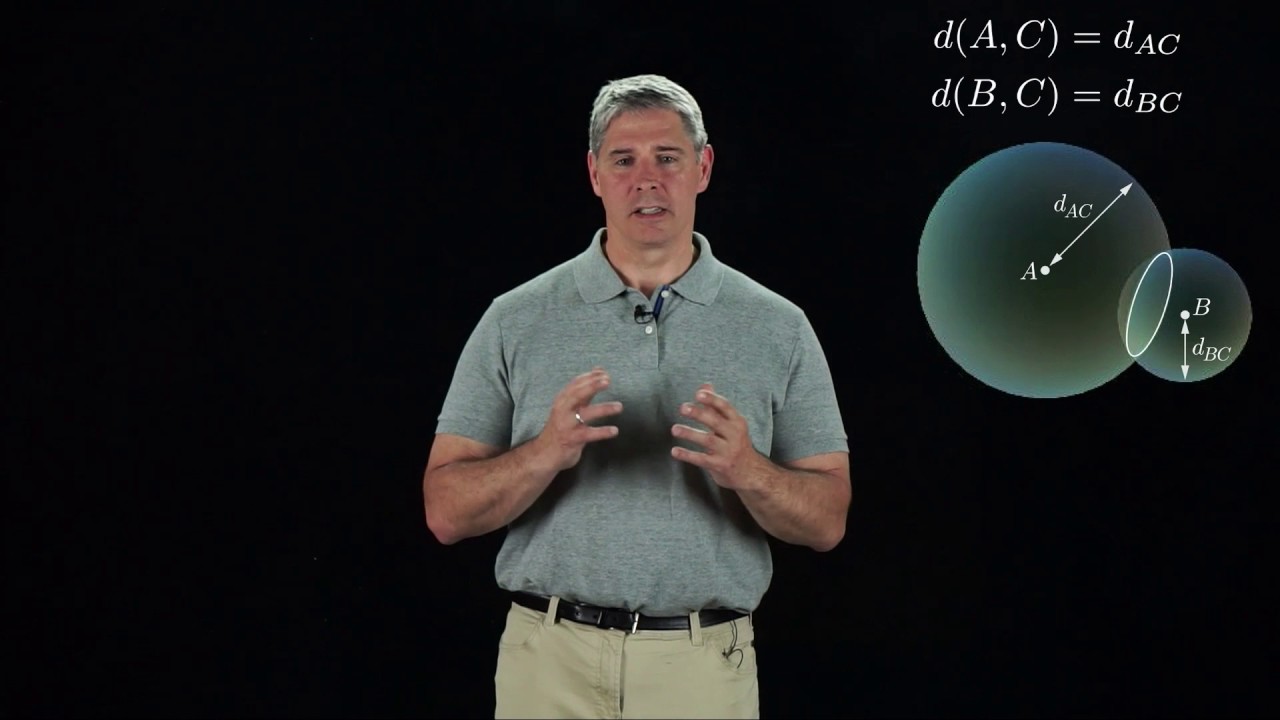
Modern Robotics, Chapter 2.1: Degrees of Freedom of a Rigid Body Northwestern Robotics 5:15 7 years ago 81 133 Далее Скачать
Modern Robotics, Chapters 2 and 3: Foundations of Robot Motion Northwestern Robotics 2:12 7 years ago 69 191 Далее Скачать